![]()
Funded by NASA
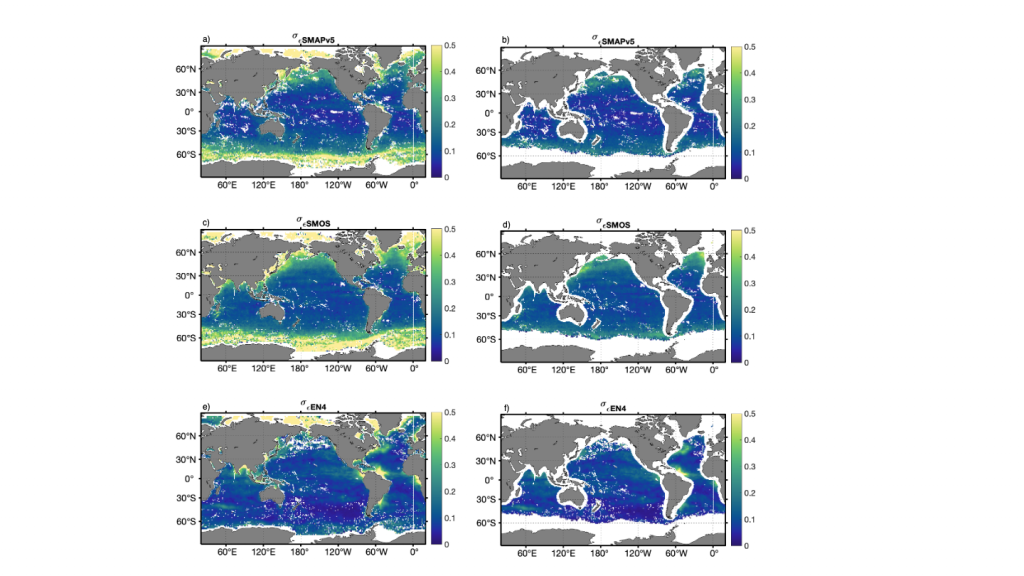
The triple point method has been applied to evaluate errors for SMAP V5.0 L3 satellite salinity as part of product validation efforts. Temporally averaged, monthly, unscaled error variances for the three datasets are shown above. On the left, minimal quality flags are applied to SMAP data so that errors can be estimated in regions where satellite datasets are known to have larger errors (cold water, close to land). On the right, all data flags have been applied. The satellite datasets have largest errors at high latitudes, in regions of cold water and/or with ice. Additionally, satellite datasets have larger errors closer to land (e.g. Mediterranean Sea). In situ-based datasets have larger errors in stratified and/or highly dynamic regions such as western boundary currents, river outflow, and upwelling regions as well as regions with fewer in situ measurements (e.g. the Arctic). Since EN4 measurements are taken at depth, errors are due to both vertical (stratification) and spatial (latitude/longitude) representation errors. This highlights the strengths, weakness, and complimentary features of the observation platforms.
- Satellite datasets are essential for observing dynamic regions and surface salinity in highly stratified regions.
- In situ datasets have overall lower error, but higher representation errors.